
One of the joys in my life has been inventing robots. In this post, I describe three mobile manipulators for which I was the lead inventor: EL-E, Dusty, and NewRo. Although I don’t discuss it in this post, I also led the design of Cody, a mobile manipulator that influenced the design of the Meka M1.
EL-E
My lab unveiled EL-E in 2008. The image at the top of this post shows EL-E delivering an object to me. EL-E was the first mobile manipulator my lab created. As shown in our demonstration video, EL-E provided a clickable world that mapped virtual buttons to robot behaviors. People commanded the robot by selecting parts of the real world via a laser-pointer interface or a touch screen. For example, selecting an object on the floor would result in EL-E picking it up, while selecting a door handle would result in EL-E opening the door. This was a type of augmented-reality interface (AR), although we didn’t use the term at the time.
We conducted extensive research with EL-E, including studies in which people with disabilities commanded EL-E to pick up objects and deliver objects. I recommend our journal article from 2010, which has a thorough description and evaluation of autonomous navigation and grasping. Our straightforward methods worked remarkably well for objects in isolation. You can also find useful insights in our papers that considered service dogs as a model for assistive robots, and modifications of the environment to help robots help people.
Dusty
As we reported in our journal article from 2012, Dusty was remarkably good at picking up objects from the floor and delivering them. Retrieving dropped objects can be a challenge for people with disabilities, and some disabilities can increase the chance of dropping objects. In our study, 20 people with ALS used Dusty to successfully retrieve an object for themselves in 59 out of 60 trials, examples of which can be seen in a video from our study. Dusty also achieved a 98.4% success rate at autonomously grasping 25 objects that were highly ranked for retrieval by people with ALS. You can watch videos of our grasping evaluations for tile flooring, wood flooring, granite flooring, short pile carpet, and medium pile carpet. The people in our study reported high overall satisfaction and found Dusty to be significantly easier to use than other methods of object retrieval. 14 out of 20 people reported that they preferred Dusty over their current methods of object retrieval. Our first published work on Dusty was in 2009.
NewRo


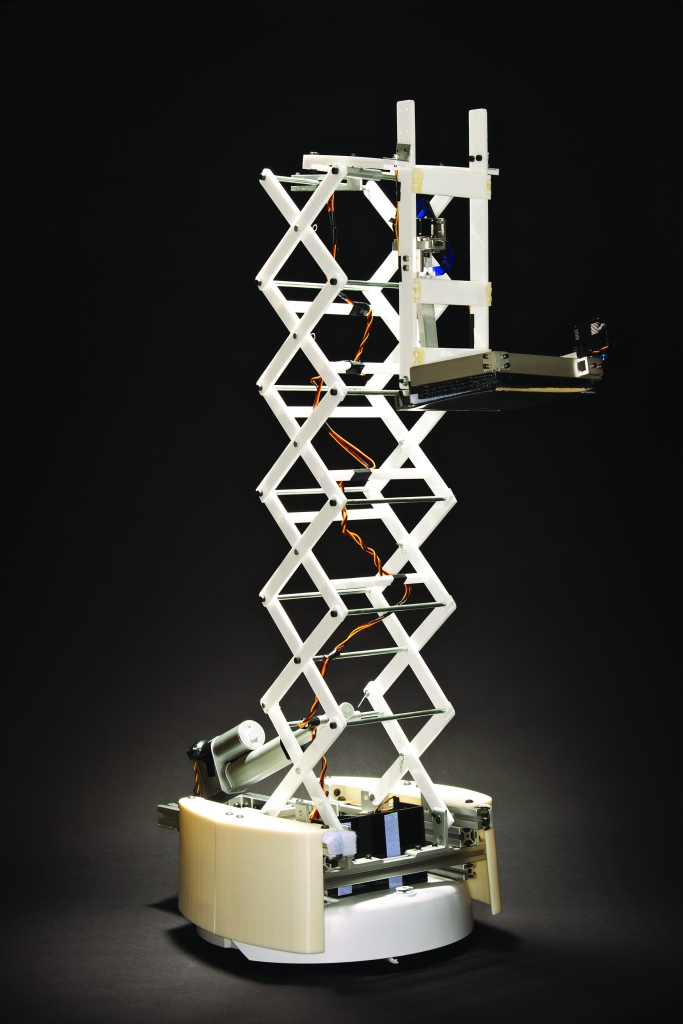
In October 2016, I wrote down the initial ideas for NewRo. Soon after, Henry M. Clever started working with me to further develop the ideas and create a novel prototype robot and gripper. These patented innovations inspired Stretch, which is a commercial mobile manipulator created by Hello Robot Inc. We also took NewRo out of our lab to investigate multimodal tactile perception of objects in a real home. To gain insight into the origins of Stretch, you can watch the NewRo demo video that got people in the Bay Area excited. We also have a video of NewRo touching objects in a real home.
Conflict of Interest Statement: Dr. Kemp benefits from Hello Robot’s success. He works there part time, owns equity in the company, and receives royalties. Hello Robot Inc. is a company that commercialized robotic technologies initially developed in the Healthcare Robotics Lab at Georgia Tech.
